Arduino UNO R4 Wifi 官方文档 - UltiRobot
Arduino UNO R4 WiFi 开发板
官方原文地址:英文文档
Arduino UNO是我们最受欢迎且在全球范围内得到认可的开发板,自发布以来,它已成为制造者社区和教育界的重要组成部分。Arduino UNO R4 WiFi开发板是UNO开发板第四版的一部分,也是第一个搭载32位微控制器(MCU)的版本(来自瑞萨电子的RA4M1系列)。
本文档作为UNO R4 WiFi的技术概览,您将找到一系列资源和指南链接,帮助您开始下一个项目。
ESP32模块和瑞萨RA4M1芯片是一个复杂的USB-串行系统的一部分,它非常灵活和适应性强,以支持HID特性,同时保留编程主MCU和ESP32的能力,如果您愿意的话(尽管这是一个高级选项,需要一些技术手段)。
默认情况下,板载的ESP32模块运行的固件负责UNO R4 WiFi的连接性。您可能需要更新此固件以启用新功能,或解决漏洞和其他问题。更新这个固件有几种方法,您可以在我们的帮助中心文章中找到它们的详细信息。
您还可以访问Arduino UNO R4 WiFi的文档平台。
数据手册
完整的数据手册可以从下面的链接下载PDF文件:
电源供应
开发板可以通过VIN引脚供电,支持6-24V的范围。VIN引脚也连接到直流插孔(圆柱插头连接器)。
通过VIN引脚供电时,您正在使用板载调节器将电压降至5V,这意味着5V引脚可以提供高达1.2A的电流。请记住,这个电压调节器也为电路板上的其余部分供电,包括MCU、LED等组件。
外部设备(例如伺服电机)如果电流需求较大,绝不应通过5V引脚供电。它主要用于电流需求较低的设备,如传感器模块。
如果您使用USB-C®连接器,必须用5V供电。
通过USB供电时,您完全绕过了板载电压调节器。在这种情况下,5V引脚可以提供高达2A的电流,而不会损坏开发板。
核心
UNO R4 WiFi基于Arduino UNO R4 Core。
安装
UNO R4 WiFi可以通过Arduino IDE、Arduino Web Editor或Arduino CLI编程。
Arduino IDE
要在Arduino IDE中使用这块开发板,您需要从板管理器安装最新版本的Arduino UNO R4 Boards包。
在开始使用UNO R4 WiFi指南中了解更多信息。
Arduino Web Editor
Web Editor是一个在线IDE,包括所有官方板,无需安装核心/包。您需要在计算机上安装Create插件才能使用Web Editor。
在开始使用Web Editor指南中了解更多信息。
Arduino IoT Cloud
Arduino UNO R4 WiFi与Arduino IoT Cloud兼容,这是一个云服务,允许您在短时间内创建IoT应用程序。
访问开始使用Arduino IoT Cloud指南获取更多信息。
瑞萨RA4M1
UNO R4 WiFi采用了强大且非常稳健的瑞萨微控制器,该控制器也用于UNO R4 Minima上。瑞萨的微控制器以其高性能和稳健性而闻名,包括其内置的外设集。
这些外设包括模数转换器、定时器、脉冲宽度调制(PWM)单元、通信接口(例如UART、SPI和I2C)等。
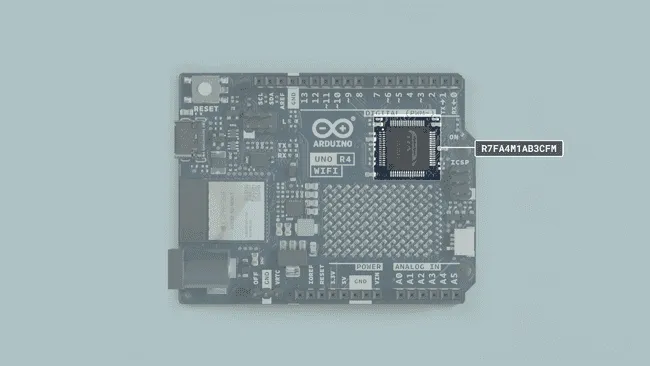
微控制器在UNO R4 WiFi上
内存
开发板特点:
- 32 kB的SRAM
- 256 kB闪存
- 8 kB数据(EEPROM)。
引脚
UNO R4 WiFi为您提供了许多不同的引脚,其中许多引脚具有特殊功能,这将在本文的后续部分中解释。继续阅读以了解您可以用它们做什么。
如果您只需要快速了解引脚的功能,这是UNO R4 WiFi上所有IO引脚的完整表格。
| 引脚 | 类型 | 功能 |
|---|---|---|
| D0 | 数字 | UART接收 |
| D1 | 数字 | UART发送 |
| D2 | 数字 | GPIO引脚,中断 |
| D3 | 数字 | GPIO引脚,中断,PWM |
| D4 | 数字 | GPIO引脚 |
| D5 | 数字 | GPIO引脚,PWM |
| D6 | 数字 | GPIO引脚,PWM |
| D7 | 数字 | GPIO引脚 |
| D8 | 数字 | GPIO引脚 |
| D9 | 数字 | GPIO引脚,PWM |
| D10 | 数字 | SPI(CS),GPIO引脚,PWM |
| D11 | 数字 | SPI(COPI),GPIO引脚,PWM |
| D12 | 数字 | SPI(CIPO),GPIO引脚 |
| D13 | 数字 | SPI(SCK),GPIO引脚,内置LED |
| A0 | 数字 | 模拟输入,DAC |
| A1 | 模拟输入 | 模拟输入,运算放大器+ |
| A2 | 模拟输入 | 模拟输入,运算放大器- |
| A3 | 模拟输入 | 模拟输入,运算放大器输出 |
| A4 | 模拟输入 | 模拟输入,SDA* |
| A5 | 模拟输入 | 模拟输入,SCL* |
*A4和A5引脚都连接到同一个I2C总线。
模拟引脚
UNO R4 WiFi有六个模拟输入引脚(A0-A5),可以使用analogRead()函数读取。
| 引脚 | 类型 | 功能 |
|---|---|---|
| A0 | 模拟 | 模拟输入,DAC |
| A1 | 模拟 | 模拟输入,运算放大器+ |
| A2 | 模拟 | 模拟输入,运算放大器- |
| A3 | 模拟 | 模拟输入,运算放大器输出 |
| A4 | 模拟 | 模拟输入,SDA* |
| A5 | 模拟 | 模拟输入,SCL* |
*A4和A5引脚都连接到同一个I2C总线。
value = analogRead(pin);
这些引脚的默认参考电压是5V,但可以如下更改:
analogReference(AR_DEFAULT) // 默认参考5V
analogReference(AR_INTERNAL) // 内置参考1.5V
默认分辨率设为10位,但可以更新为12位和14位分辨率。要这样做,请在您的草图的setup()中使用以下方法。
analogReadResolution(10) // 默认
analogReadResolution(12)
analogReadResolution(14)
要了解更多关于UNO R4 WiFi的ADC能力,请查看ADC分辨率指南。
运算放大器引脚
RA4M1有一个内部运算放大器,在UNO R4 WiFi上如下公开:
| 引脚 | 运算放大器 |
|---|---|
| A1 | 运算放大器+ |
| A2 | 运算放大器- |
| A3 | 运算放大器输出 |
数字引脚
UNO R4 WiFi共有14个数字引脚。尽管有些引脚有其他用途,如果有其他引脚可用,不应用于GPIO。
导出ExcelJsonSQL
| 引脚 | 功能 | 注释 |
|---|---|---|
| 0 | RX | 串行通信 |
| 1 | TX | 串行通信 |
| 2 | GPIO | 数字IO引脚 |
| 3 | PWM | 数字IO引脚,PWM |
| 4 | GPIO | 数字IO引脚 |
| 5 | PWM | 数字IO引脚,PWM |
| 6 | PWM | 数字IO引脚,PWM |
| 7 | GPIO | 数字IO引脚 |
| 8 | GPIO | 数字IO引脚 |
| 9 | PWM | 数字IO引脚,PWM |
| 10 | PWM | 数字IO引脚,PWM |
| 11 | PWM | 数字IO引脚,PWM |
| 12 | GPIO | 数字IO引脚 |
| 13 | GPIO | 数字IO引脚 |
所有数字引脚的参考电压是5V。
PWM
PWM(脉冲宽度调制)功能允许数字引脚通过非常快速地开关来模拟模拟输出,从而让您做一些事情,比如调光连接到数字引脚的LED。
UNO R4 WiFi支持在标有~的引脚上使用PWM。官方支持的引脚有:
| 引脚 | RA4M1 | 计时器 |
|---|---|---|
| D3 | P105 | GTIOC1A |
| D5 | P107 | GTIOC0A |
| D6 | P111 | GTIOC3A |
| D9 | P303 | GTIOC7B |
| D10 | P103 | GTIOC2A |
| D11 | P411 | GTIOC6A |
您可以使用以下函数将它们作为模拟输出引脚:
analogWrite(pin, value);
默认情况下,分辨率是8位(0-255),您可以使用analogWriteResolution()来改变这一点,支持高达12位(0-4096)分辨率。
analogWriteResolution(resolution);
请注意,以下引脚能够进行PWM,但可能会干扰UNO R4 WiFi板的其他功能。编写库函数时,请不要使用这些,因为它们不是官方支持的PWM引脚。
| 引脚 | RA4M1 | 计时器 |
|---|---|---|
| D0 | P301 | GTIOC4B |
| D1 | P302 | GTIOC4A |
| D2 | P104 | GTIOC1B |
| D4 | P106 | GTIOC0B |
| D7 | P112 | GTIOC3B |
| D8 | P304 | GTIOC7A |
| D12 | P410 | GTIOC6B |
| D13 | P102 | GTIOC2B |
| D18 / SDA | P101 | GTIOC5A |
| D19 / SCL | P100 | GTIOC5B |
LED Matrix
UNO R4 WiFi 上的 LED 矩阵可以在您的程序中使用,用于显示静态图像、动画,甚至可以在其上玩游戏。Renesas 核心包括 Arduino_LED_Matrix 库,用于在矩阵上显示帧。
要深入了解 LED 矩阵,请查看 LED 矩阵指南。
Arduino_LED_Matrix matrix - 初始化 LED 矩阵。
Arduino_LED_Matrix.load() - 将帧加载到帧缓冲区中。以下是一个基本示例:
// 创建两个帧的数组
const uint32_t frames[][4] = {
{
0x0,
0x0,
0xc00c0000,
150
},
{
0x0,
0x1e01,
0x201201e0,
150
}
}
// 将帧加载到矩阵缓冲区中
matrix.load(frames);
DAC
UNO R4 WiFi 还包含一个最高 12 位分辨率的 DAC,它可以作为真正的模拟输出引脚,这意味着它的功能比 PWM 引脚更强大。
analogWrite(pin, value);
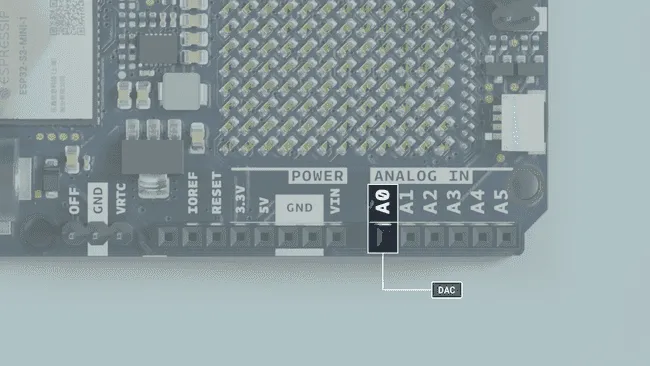
DAC 引脚
此 DAC 引脚默认的写入分辨率为 8 位。这意味着写入到引脚的值应该在 0-255 之间。
但是,如果需要,您可以将此写入分辨率更改为最高 12 位,在这种情况下,您写入到引脚的值应该在 0-4096 之间。
analogWriteResolution(12);
要了解更多关于 UNO R4 WiFi 的 DAC 功能,请查看 DAC 指南。
RTC
实时时钟(RTC)用于测量时间,在任何跟踪时间的应用中都非常有用。
UNO R4 WiFi 具有一个 VRTC 引脚,即使在电源被切断时也用于保持板载 RTC 的运行。为了使用它,请将 1.6 - 3.6 V 的电压应用于 VRTC 引脚。
以下是一个最小示例,展示了如何从 RTC 获取日期和时间:
#include "RTC.h"
void setup() {
Serial.begin(9600);
RTC.begin();
RTCTime mytime(30, Month::JUNE, 2023, 13, 37, 00, DayOfWeek::WEDNESDAY, SaveLight::SAVING_TIME_ACTIVE);
RTC.setTime(mytime);
}
void loop() {
RTCTime currenttime;
// 从 RTC 获取当前时间
RTC.getTime(currenttime);
// 打印日期(日/月/年)
Serial.print(currenttime.getDayOfMonth());
Serial.print("/");
Serial.print(Month2int(currenttime.getMonth()));
Serial.print("/");
Serial.print(currenttime.getYear());
Serial.print(" - ");
// 打印时间(时/分/秒)
Serial.print(currenttime.getHour());
Serial.print(":");
Serial.print(currenttime.getMinutes());
Serial.print(":");
Serial.println(currenttime.getSeconds());
delay(1000);
}
要了解更多关于 UNO R4 WiFi 的 RTC 功能,请查看 RTC 指南。
EEPROM
EEPROM,也称为 'data' 内存,是一种在板子断电后仍能保留数据的内存类型。
EEPROM.write(address, val);
EEPROM.read(address);
它的写入周期有限,这意味着它最适合用于只读应用。确保永远不要在 void loop() 内使用 write(),因为您可能会用完芯片的所有写入周期。
在 EEPROM 指南中阅读更多内容。
要了解更多关于 UNO R4 WiFi 的 EEPROM 功能,请查看 EEPROM 指南。
SPI
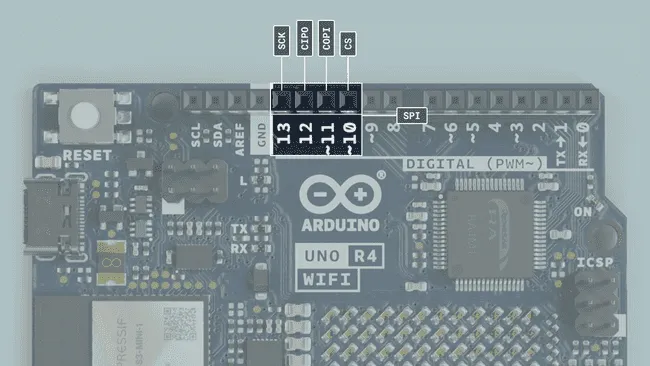
UNO R4 WiFi 特色的是一个串行外围接口(SPI)总线。总线(连接器)'SPI' 使用以下引脚:
(COPI) - D11
(CIPO) - D12
(SCK) - D13
(CS) - D10
以下示例展示了如何使用 SPI:
#include <SPI.h>
const int CS = 10;
void setup() {
pinMode(CS, OUTPUT);
SPI.begin();
digitalWrite(CS, LOW);
SPI.transfer(0x00);
digitalWrite(CS, HIGH);
}
void loop() {
}
I2C
I2C 允许您使用两个引脚串联连接多个 I2C 兼容设备。控制器将通过 I2C 总线向 7 位地址发送信息,这意味着单条线上 I2C 设备的技术限制是 128 个。实际上,您在遇到其他限制之前,永远不会达到 128 个设备。
UNO R4 WiFi 有一个 I2C 总线,它标有 SCL 和 SDA。它们与 A4(SDA)和 A5(SCL)共用,这是之前 UNO 的拥有者所熟悉的。PCB 上没有安装上拉电阻,但如果需要,有安装它们的足迹。
UNO R4 WiFi 上用于 I2C 的引脚如下:
- SDA - D14
- SCL - D15
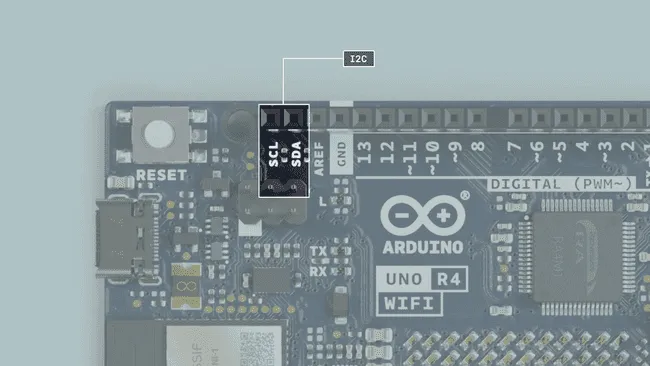
I2C 引脚
要连接 I2C 设备,您需要在草图的顶部包含 Wire 库。
#include <Wire.h>
在 void setup() 内部,您需要初始化库,并初始化您想要使用的 I2C 端口。
Wire.begin(); //SDA & SDL
Wire1.begin(); //SDA1 & SDL1
Wire2.begin(); //SDA2 & SDL2
要向通过 I2C 连接的设备写入内容,我们可以使用以下命令:
Wire.beginTransmission(1); // 开始传输到设备 1
Wire.write(byte(0x00)); // 发送指令字节
Wire.write(val); // 发送一个值
Wire.endTransmission(); // 停止传输
QWIIC连接器
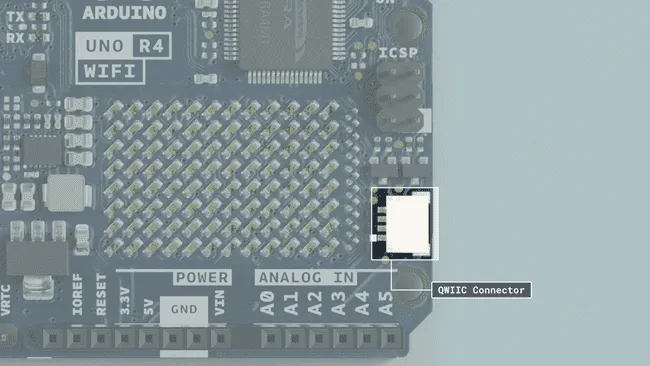
UNO WiFi R4 上的 Qwiic 连接器
UNO R4 WiFi 上的 Qwiic 连接器连接到第二个 I2C 总线(IIC0),它使用 Wire1 对象而不是 Wire 对象。请注意,Qwiic 连接器仅为 3.3 V。
UNO R4 WiFi 特色的是一个 Qwiic/STEMMA 连接器,您可以使用它来连接模块,通常允许您通过单个连接器串联连接多个模块并控制它们。
Qwiic 或 STEMMA 都是 SparkFun 和 Adafruit 分别开发的连接器类型的名称,它们将开发板和分线板模块的 I2C 引脚捆绑在一起。这意味着,如果您有一个开发板(例如 Arduino UNO R4 WiFi)和一个分线板模块,并且两者都有 Qwiic 或 STEMMA 连接器,您可以将它们连接在一起,几乎不需要任何接线,您就可以快速创建多功能项目。
如果您的分线板上有不止一个这样的连接器,许多都有,您可以使用第二个来串联另一个 Qwiic 模块,为您的项目添加另一个交互节点。
UNO R4 WiFi 有两个 I2C 总线,Qwiic 连接器连接到第二个。这意味着,如果您正在使用 Wire 库,您将需要使用 Wire1 对象而不是 Wire 对象,如下面的示例所示:
#include <Wire.h>
void setup(){
Wire1.begin();
Wire1.beginTransmission(1); // 开始传输到设备 1
Wire1.write(byte(0x00)); // 发送指令字节
Wire1.write(val); // 发送一个值
Wire1.endTransmission(); // 停止传输
}
USB串行 & UART
UNO R4 WiFi开发板具备2个独立的硬件串行端口。
- 一个端口通过USB-C®暴露,
- 另一个端口通过RX/TX引脚暴露。
这是UNO R3和UNO R4之间少数不同之处之一,因为UNO R3只有一个硬件串行端口,它同时连接到USB端口和板上的RX/TX引脚。
UNO R4 WiFi上用于UART的引脚如下:
| 引脚 | 功能 |
|---|---|
| D0 | RX(接收) |
| D1 | TX(发送) |
原生USB
使用标准Serial对象将串行数据发送到计算机。
Serial.begin(9600);
Serial.print("hello world");
要通过UART发送和接收数据,我们首先需要在void setup()内设置波特率。
UART
UNO R4 WiFi上用于UART的引脚如下:
导出ExcelJsonSQL
| 引脚 | 功能 |
|---|---|
| D0 | RX0 |
| D1 | TX0 |
要通过UART发送和接收数据,我们首先需要在void setup()内设置波特率。注意当使用UART(RX/TX引脚)时,我们使用Serial1对象。
Serial1.begin(9600);
复制
要读取传入的数据,我们可以使用一个while循环()来读取每个字符并将其添加到字符串中。
while(Serial1.available()){
delay(2);
char c = Serial1.read();
incoming += c;
}
复制
要写入内容,我们可以使用以下命令:
Serial1.write("Hello world!");
复制
Serial Event
serialEvent()方法在UNO板的旧版本上受支持,但在UNO R4板(或任何其他更新的Arduino板)上不受支持。
然而,由于此方法仅用于检测串行数据并执行函数,您也可以使用Serial.available()来检测新数据何时可用:
if(Serial.available() > 0) {
//code goes here
}
复制
计时器
在Ardunio API中有一个FspTimer类,它提供了在草图中使用计时器的所有必要功能。
UNO R4 WiFi有两个计时器外设,一个异步通用计时器(AGT)和一个通用PWM计时器(GPT)。板上有两个AGT计时器,其中一个用于例如millis()和microseconds()等时间测量方法。
板上有7个GPT计时器帮助执行PWM任务,例如通过测量信号活动的时间来计算占空比。可以通过使用前面提到的FspTimer库来使用这些保留的PWM计时器。使用此功能将明确请求一个PWM计时器:
FspTimer::force_use_of_pwm_reserved_timer();
复制
使用库的计时器功能时,您需要输入计时器类型。可以是AGT或GPT。可以在草图中这样声明:
uint8_t gpt_timer_type = GPT_TIMER;
uint8_t agt_timer_type = AGT_TIMER;
复制
SerialUSB
UNO R4 WiFi具有一组扩展的Serial方法,可在您的草图中包含<HID.h>库时启用。
- Serial.baud() - 返回当前使用的波特率(int)。
- Serial.stopbits() - 返回通信中使用的停止位数(int)。
- Serial.paritytype() - 返回通信中使用的奇偶校验类型(int)。
- Serial.numbits() - 返回通信中使用的数据位数(int)。
- Serial.dtr() - 返回数据终端就绪(DTR)信号的状态(bool),并且如果DTR信号被积极使用,则还将ignore_dtr标志设置为true。
- Serial.rts() - 返回请求发送(RTS)信号的状态(bool)。
<HID.h>库将Serial对象重映射为SerialUSB,从而启用这些附加功能。
支持链接:
- SerialUSB.h (Github)。
USB HID
请注意,由于USB端口在UNO R4 WiFi上的实现方式,当使用HID时,开发板可能会显示为不同的USB端口。如果发生这种情况,只需双击重置按钮,然后再次选择您的开发板。
该开发板可以充当HID(键盘/鼠标)并通过原生USB向计算机发送按键或坐标。
keyboard.press('W');
mouse.move(x,y);
复制
通过在IDE中的库管理器安装键盘和鼠标库,可以启用此支持。
要了解更多有关UNO R4 WiFi的HID功能,请查看HID指南。
Serial Remap
当在草图中包含<HID.h>库时,串行对象从Serial切换为SerialUSB以支持HID功能。这启用了更多方法,这里列出了。
支持链接:
- HID.h (Github)
CAN模块
UNO R4 WiFi的RA4M1内置了符合CAN 2.0A/CAN 2.0B标准的CAN模块。
引脚CANRX和CANTX可以连接到CAN收发器,例如MCP2551或TJA1050 IC。
导出ExcelJsonSQL
| 引脚 | 功能 |
|---|---|
| D10 | CANRX |
| D13 | CANTX |
内置的Arduino_CAN库用于与其他CAN设备通信。
//设置CAN位速率并在
//选择BR_125k,BR_250k,BR_500k,BR_1000k
CAN.beginBR_250k;
构造一个CAN消息并发送它:
uint8_t const msg_data[] = {0xCA,0xFE,0,0,0,0,0,0};
memcpy((void *)(msg_data + 4), &msg_cnt, sizeof(msg_cnt));
CanMsg msg(CAN_ID, sizeof(msg_data), msg_data);
CAN.write(msg);
读取传入的CAN消息。
CanMsg const msg = CAN.read(); //read
请注意,如果没有CAN收发器,就无法与其他CAN设备通信。
要了解更多关于UNO R4 WiFi的CAN功能,请查看CAN指南。
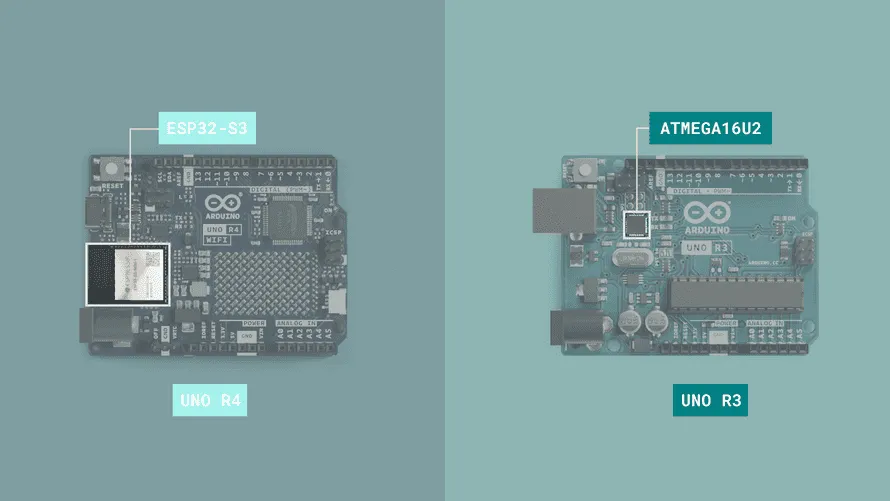
ESP32-S3-MINI-1-N8
默认情况下,UNO R4 WiFi上的ESP32-S3模块充当串行桥,处理与计算机的连接。它还处理主MCU,即Renesas RA4M1的重启,例如在接收新草图和重置时。
在UNO R3上,ATMEGA16U2承担相同的功能。板载ESP32模块是一个更先进的SoC,为开发板添加了Wi-Fi®和Bluetooth®连接功能。
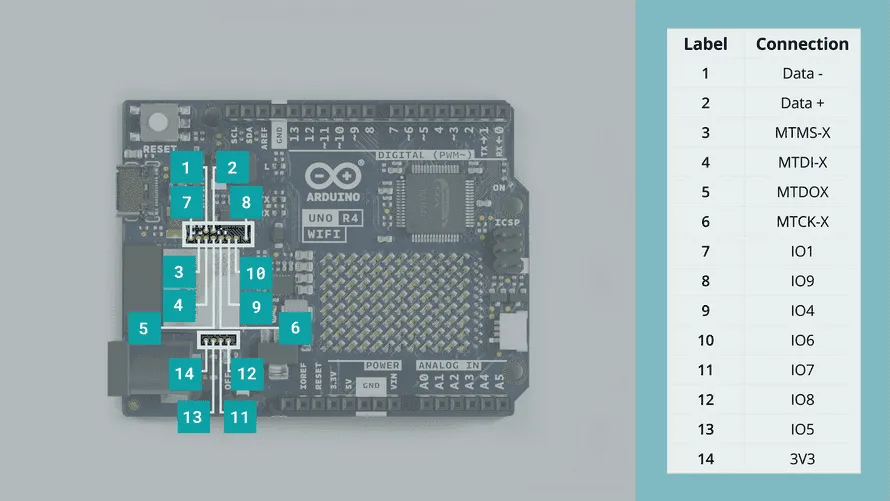
ESP32还暴露了ESP32的数据线,以便您可以直接对ESP32进行编程。这些数据线通过板顶部的3x2排针暴露,或者通过板底部的焊盘暴露。
请注意,ESP32安装有默认固件,设置为与RA4M1芯片通信。任何对ESP32的直接编程都将覆盖该固件,直到恢复默认固件之前,芯片之间的通信可能会中断。
UNO R4 & UNO R3
USB桥
默认情况下,ESP32充当计算机和RA4M1 MCU之间的串行桥。USB数据线通过开关路由,这些开关默认设置为通过ESP32模块进行通信。
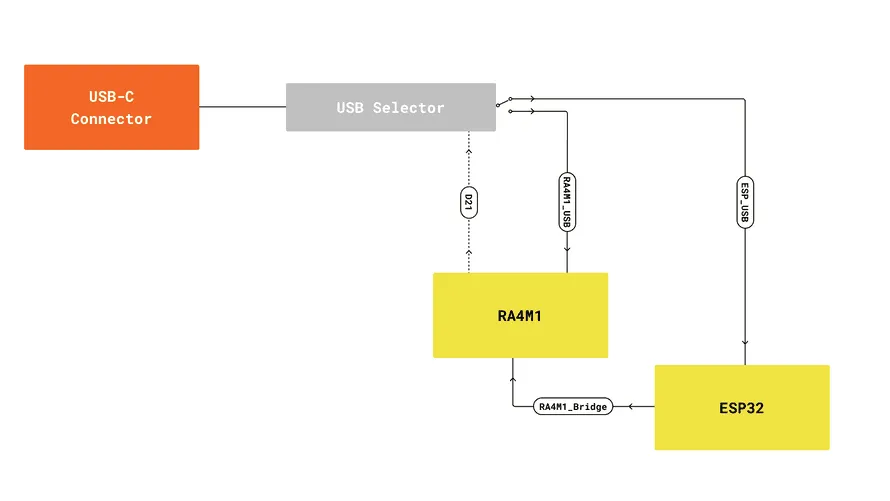
串行通信开关
如果您愿意,可以更改此设置并直接访问RA4M1 MCU上的串行总线,无论是使用软件还是硬件。请参阅下面的说明:
1. 软件 - 通过将D21拉高至HIGH,您将关闭控制哪个MCU连接到USB的电路。当D21为HIGH时,RA4M1连接到USB串行端口,当D21为LOW时,ESP32连接,如默认配置。您可以通过在void setup()中包含以下代码来实现这一点
pinMode(21, OUTPUT);
digitalWrite(21, HIGH);
2. 在UNO R4 WiFi的背面,您会找到标有"RA4M1 USB"的焊盘。如果您在这些焊盘之间创建短路,例如用焊锡在它们之间创建桥接,RA4M1将连接到USB串行端口,而不是ESP32。
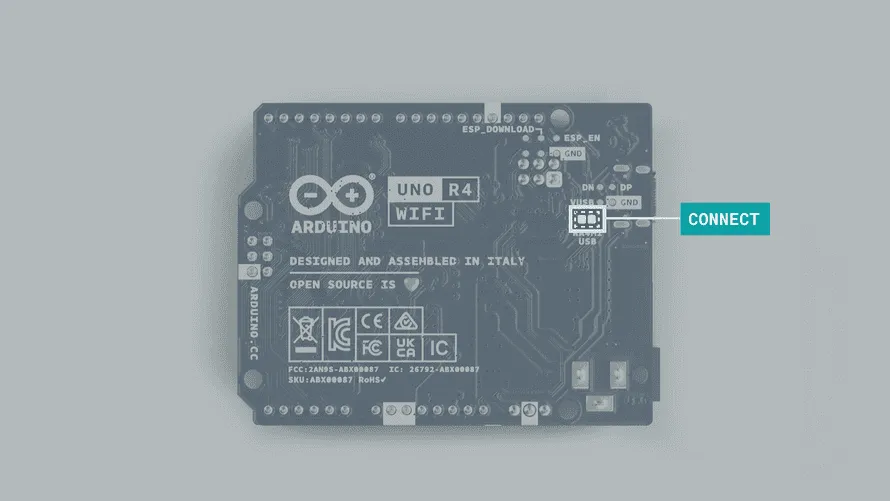
RA4M1 USB焊盘
Wi-Fi®
UNO R4 WiFi上的ESP32用于赋予开发板Wi-Fi®功能。Wi-Fi®模块的比特率高达150 Mbps。ESP32模块内置了迹线天线,这意味着您不需要外部天线就可以使用开发板的连接功能。然而,这种迹线天线与Bluetooth®模块共享,这意味着您不能同时使用Bluetooth®和Wi-Fi®。
要使用UNO R4 WiFi的Wi-Fi®功能,请使用内置于UNO R4 Core的WiFiS3库。
要了解更多关于UNO R4 WiFi的Wi-Fi®功能,请尝试Network Examples。
Bluetooth®
多亏了ESP32模块,UNO R4 WiFi具有Bluetooth® LE和Bluetooth® 5功能,速度高达2 Mbps。ESP32模块内置了迹线天线,这意味着您不需要外部天线就可以使用开发板的连接功能。然而,这种迹线天线与Bluetooth®模块共享,这意味着您不能同时使用Bluetooth®和Wi-Fi®。
下面是一个扫描蓝牙设备的示例草图:
#include <ArduinoBLE.h>
void setup() {
// ...省略其余代码...
}
void loop() {
// ...省略其余代码...
}
void explorerPeripheral(BLEDevice peripheral) {
// ...省略其余代码...
}
void exploreService(BLEService service) {
// ...省略其余代码...
}
void exploreCharacteristic(BLECharacteristic characteristic) {
// ...省略其余代码...
}
void exploreDescriptor(BLEDescriptor descriptor) {
// ...省略其余代码...
}
void printData(const unsigned char data[], int length) {
// ...省略其余代码...
}
如果您想了解更多关于Bluetooth LE的信息,请查看我们的文章。
编程ESP32(高级)
ESP32模块和Renesas RA4M1芯片是一个复杂的USB-串行系统的一部分,这个系统具有很高的灵活性和适应性,能够在保持编程主MCU和ESP32的能力的同时允许HID功能。默认情况下,ESP32主要用作使用Wi-Fi®和Bluetooth®的无线模块。
覆盖ESP32的固件会中断两个MCU之间的通信,但使它们能够独立行动。如果您希望将开发板恢复到初始状态,您可以按照我们帮助中心文章中的espflash步骤操作。
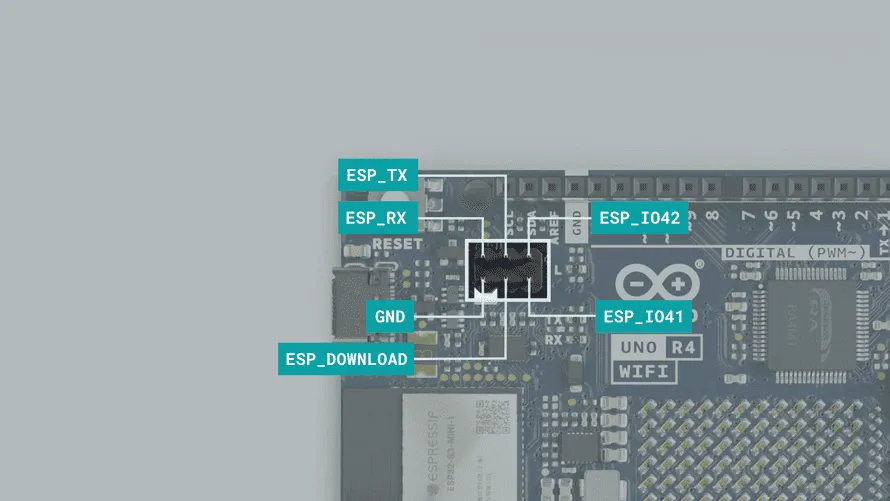
注意:要重新编程ESP32模块,您需要在重置开发板时将ESP_Download引脚短接至GND。这将使ESP32模块进入引导加载程序状态,在该状态下您可以与之建立连接并重新编程模块。
要重新编程ESP32开发板,您可以在ESP32模块旁边找到UART焊盘,其布局如下图所示:
暴露的ESP32数据焊盘
或者您可以直接使用ESP32排针上暴露的引脚,如下所示:
ESP32数据引脚排针